

Our Research
From Multiscale Models to Flight-Ready Structures: High-Fidelity Modeling & Control
We fuse LiDAR-assisted geometry capture, finite-element simulation and AI-driven optimization to predict, design and actively control complex civil and aerospace structures under dynamic, thermal and fatigue loads.

Themes in our work
Multiphysics Finite-Element Modeling
Non-linear, transient FE models couple vibration, thermo-elasticity and fatigue to forecast lifetime behavior of bridges and UAV airframes.

AI-Assisted Optimization
Surrogate models (Kriging, RSM) and gradient search converge on lighter, stiffer, more damage-tolerant designs in a fraction of the usual CPU budget.

NDT-Informed Model Updating
Field vibration and infrared NDT data close the loop with digital twins, reducing parameter uncertainty and enabling condition-aware control laws.

Explore a few of our latest projects:



Featured Project
Integration of a New Conceptual Design for VTOL UAV with Multi-Level Optimization
As the combination of FW (Fixed-Wing) and VTOL (Vertical-Taking-Off-and-Landing) UAV (Unmanned Aerial Vehicle), the hybrid drone is gaining traction because of its multi-purpose versatility.
With the aid of CFD method for test and RSM (Response Surface Methodology) for optimization, this article presents a new concept of canard wings that were integrated into the fuselage of the UAV. It combines the conventional delta wing with winglets and the canard configuration. Based on the requirements and the limitations of the design, the lift was optimized and distributed respectively to the main wing (90~95%) and to the front wing (5~10%). Multi-level optimization approach, using RSM, was developed for the optimization. At the first level, we optimize the delta wing, then a second level is applied to evaluate the final design of the canard wing from the previous step. By comparison with the initial design, this concept provides enough lift with less drag in cruise model. Besides, the control surface of the canard wing in the front could replace the tail wing that was used for trimming and dynamic controls which turns the drone into a tailless vehicle, which also reduces the UAV's weight.
Featured Project
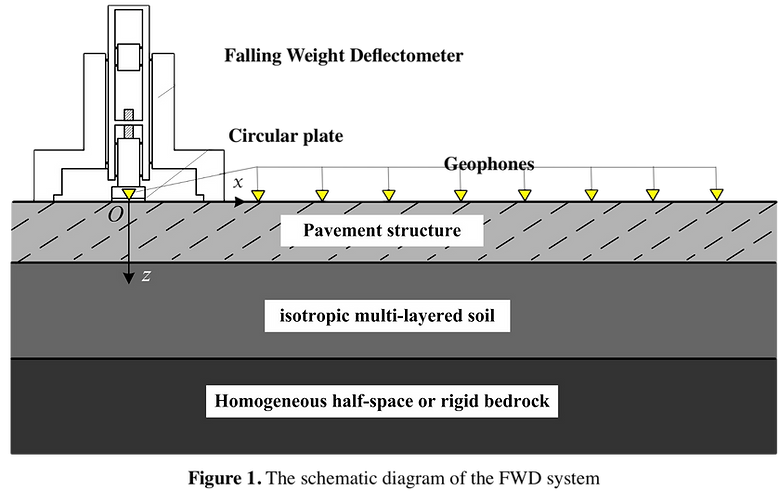
An Inversion Algorithm for the Dynamic Modulus of Concrete Pavement Structures Based on a CNN
Based on the spectral element method (SEM) and a convolutional neural network (CNN), an inversion algorithm for the dynamic modulus of concrete pavement structures is proposed in this paper.
In order to evaluate the service performance of pavement structures more systematically and accurately via the existing testing techniques using a falling weight deflectometer (FWD), it is necessary to obtain accurate dynamic modulus parameters of the structures. In this work, an inversion algorithm for predicting the dynamic modulus is established by using a CNN which is trained with the dynamic response samples of a multi-layered concrete pavement structure obtained through SEM. The gradient descent method is used to adjust the weight parameters in the network layer by layer in reverse. As a result, the accuracy of the CNN can be improved via iterative training. With the proposed algorithm, more accurate results of the dynamic modulus of pavement structures are obtained. The accuracy and numerical stability of the proposed algorithm are verified by several numerical examples. The dynamic modulus and thickness of concrete pavement structure layers can be accurately predicted by the CNN trained with a certain number of training samples based on the displacement curve of the deflection basin from the falling weight deflectometer. The proposed method can provide a reliable testing tool for the FWD technique of pavement structures.

Featured Project
Bridge Modal Parameter Identification from UAV Measurement Based on EMD & Fourier Transform
This paper proposes two approaches, Empirical Mode Decomposition (EMD) and Fourier Transform (FT), to correct the vibration signals measured by an Unmanned Aerial Vehicle (UAV), which overcomes the difficulty of selection of reference points used in other correction methods, such as homography transformation and three-dimensional reconstruction.
In the method of this paper, a UAV is used to collect the video of a vibrated bridge, and the displacement signal of the bridge is obtained from the video by Kanade–Lucas–Tomasi (KLT) optical flow method, which contains false displacement caused by the ego-motion of the UAV during the measurement. The false displacement can be effectively eliminated by EMD and FT to obtain the real displacement signal. Finally, the displacement signal is processed by the Operational Modal Analysis (OMA) technique to obtain the bridge modal parameters. The performance of correcting vibration signals and extracting bridge modal parameters from the vibration signals based on EMD, FT, and Differential Filtering (DF) are compared by taking the fixed camera measurement as a reference (the accuracy of measuring bridge vibration with fixed cameras has been verified) in this paper, and it is demonstrated that EMD has better reliability in processing signal measured by UAVs, which is mainly due to the absence of random factors and too much noise in the signal processing process of EMD.
