

我们的研究
洞察无形:无人机驱动、视觉驱动的无损检测
我们的团队设计了敏捷传感系统(无人机、视觉、MEMS 阵列),以捕捉传统仪表所遗漏的高保真运动、应力和振动数据。
此页面仍在建设中

我们工作的主题
无人机视觉计量
CNN 校正的光流可追踪距离 > 30 米的亚毫米级位移,从而实现无需脚手架的快速桥梁勘测。

缆索及斜拉索监测
无需安装加速度计,EMD 清洗信号即可显示自然频率和力,从而实现完全非接触式检查。

信号校正与去噪
贝叶斯优化和光谱滤波消除了无人机的自我运动,从恶劣的现场环境中提供了实验室级数据。

探索我们的一些最新项目:



特色项目
无人机结合 CNN 和 KLT 光流测量桥梁振动
提出了一种结合卷积神经网络(CNN)和 Kanade-Lucas-Tomasi 光流法(KLT)的无人飞行器(UAV)桥梁振动测量方法。
在该方法中,需要结构背景中的静态参考点,使用无人机拍摄结构视频,并使用 KLT 光流方法跟踪视频中结构上的目标点和背景参考点,获得这些点在每一帧上的坐标。然后,根据参考点和目标点的坐标,利用 CNN 学习参考点和目标点之间的特征关系,从而修正目标点位移时史曲线中包含的由无人机自我运动引起的虚假位移。最后,利用运算模态分析(OMA)从位移信号中提取结构的固有频率。此外,本文还通过对比固定摄像机的测量结果和无人机结合 CNN 的测量结果,证明了无人机测量结合 CNN 的可靠性;通过对比本文实验中数字图像相关法(DIC)和 KLT 光流法的跟踪结果,证明了 KLT 光流法的可靠性。
特色项目
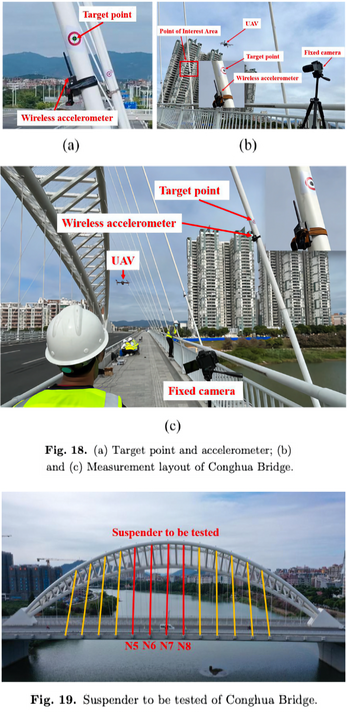
基于 UAV 和 EMD 的缆索力估算方法
为解决传统缆索力测量中加速度计难以布放的问题,本文提出了一种基于无人飞行器(UAV)的缆索力测量方法。
该方法首先使用 Kanade-Lucas-Tomasi (KLT) 光流方法跟踪无人机捕捉到的桥梁缆索目标点的振动视频,获得其位移-时间-历史曲线。然后,使用经验模态分解法(EMD)对这些曲线进行修正,以获得目标点的真实位移响应。最后,利用运行模态分析(OMA)从位移响应中获得缆索的固有频率,并据此计算缆索力。实验结果表明,与固定相机和加速度计相比,测量到的缆索固有频率的相对偏差在 5%以内,这表明无人机可以有效地获取桥梁缆索的固有频率并计算缆索力。
特色项目
基于贝叶斯优化和 CNN 的无人机桥梁振动测量方法
提出了一种基于卷积神经网络(CNN)和贝叶斯优化(BO)的无人机(UAV)桥梁振动测量方法。
在所提出的方法中,先用无人机采集桥梁结构的视频,然后用 Kanade-Lucas-Tomasi (KLT) 光流方法跟踪视频中桥梁背景中的参考点和桥梁上的目标点,从而得到它们的坐标。利用 BO 找到 CNN 的最优超参数组合,并利用基于 BO 的 CNN 对无人机采集到的桥梁位移信号进行校正。最后,通过运行模态分析(OMA)处理校正后的位移信号,提取桥梁的固有频率。此外,实验模型采用钢桁架。通过两组对比实验得出了基于 BO 的 CNN 最佳修正效果的参考点数量和无人机拍摄时间,并通过另一组对比实验确定了结构与参考点之间的距离对基于 BO 的 CNN 修正效果的影响。本文的结论对实际桥梁振动测量具有重要的指导意义。



