

Nos recherches
Voir l’invisible : Contrôle Non Destructif par Vision et UAV
Notre équipe conçoit des systèmes de détection agiles — drones, vision, réseaux de MEMS — pour capturer des données de mouvement, de contrainte et de vibration haute fidélité que les capteurs traditionnels ne peuvent détecter.
Cette page est encore en construction

Thèmes de notre travail
Métrologie visuelle par drone (UAV)
Un flux optique corrigé par CNN permet de suivre des déplacements sub-millimétriques à partir de distances supérieures à 30 mètres, rendant possibles des inspections rapides de ponts sans échafaudage.

Surveillance des câbles et haubans
Les signaux nettoyés par décomposition empirique en modes (EMD) révèlent les fréquences propres et les forces sans nécessiter l’installation d’accéléromètres, permettant une inspection totalement sans contact.

Correction et débruitage des signaux
L’optimisation bayésienne combinée au filtrage spectral élimine les effets du mouvement propre du drone, fournissant des données de qualité laboratoire même en conditions de terrain difficiles.

Découvrez quelques-uns de nos derniers projets :



Projet en vedette
Mesure des vibrations de ponts par drones combinée avec CNN et flux optique KLT
Une méthode de mesure des vibrations de ponts par drones (UAV), combinant réseaux de neurones convolutifs (CNN) et méthode du flux optique de Kanade–Lucas–Tomasi (KLT), est proposée.
Dans cette méthode, des points de référence fixes dans l’arrière-plan structurel sont requis. Un drone capture la vidéo de la structure, puis la méthode du flux optique KLT est utilisée pour suivre les points cibles sur la structure et les points de référence. Les coordonnées des points sont extraites pour chaque image. Un CNN apprend ensuite la relation entre les points de référence et les points cibles, afin de corriger les courbes de déplacement faussées par le mouvement propre du drone. Enfin, l’analyse modale opérationnelle (OMA) permet d’extraire les fréquences naturelles. La comparaison entre les mesures par caméra fixe et celles du système UAV+CNN valide la fiabilité de la méthode. La fiabilité du KLT est également confirmée par comparaison avec la corrélation d’images numériques (DIC).
Projet en vedette
Méthode d’estimation de la force des câbles basée sur les drones et la décomposition empirique en modes (EMD)
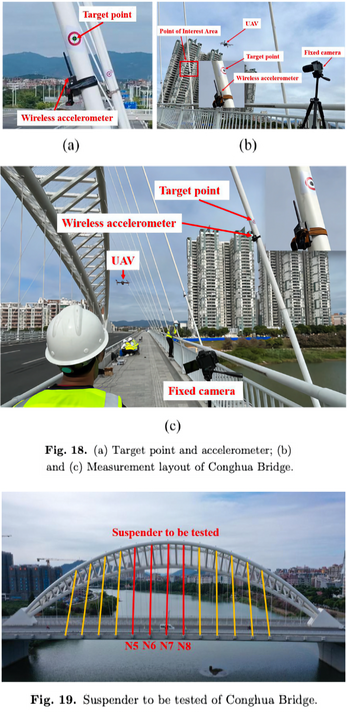
Pour résoudre les difficultés liées au déploiement des accéléromètres dans la mesure traditionnelle des forces de câbles, cet article propose une méthode de mesure des forces de câbles basée sur des véhicules aériens sans pilote (UAV).
Cette méthode commence par utiliser le flux optique Kanade-Lucas-Tomasi (KLT) pour suivre les points cibles sur les câbles du pont à partir d’une vidéo capturée par drone, afin d’obtenir la courbe déplacement-temps. Ensuite, la décomposition empirique en modes (EMD) est utilisée pour corriger cette courbe et obtenir la réponse de déplacement réelle. Enfin, l’analyse modale opérationnelle (OMA) permet d’extraire la fréquence propre du câble, à partir de laquelle la force de câble est calculée. Les résultats expérimentaux montrent que l’écart relatif de la fréquence mesurée par drone reste inférieur à 5 % par rapport aux caméras fixes et accéléromètres, démontrant que les drones peuvent être utilisés efficacement pour estimer la fréquence propre et la force des câbles de ponts.
Projet en vedette
Une méthode de mesure des vibrations des ponts par drones basée sur l’optimisation bayésienne et les CNN
Une méthode de mesure des vibrations des ponts par véhicules aériens sans pilote (UAV), basée sur un réseau de neurones convolutifs (CNN) et l’optimisation bayésienne (BO), est proposée.
Dans la méthode proposée, la vidéo de la structure du pont est collectée par un drone, puis les points de référence à l'arrière-plan du pont et les points cibles sur le pont dans la vidéo sont suivis par la méthode de flux optique Kanade-Lucas-Tomasi (KLT), afin d'obtenir leurs coordonnées. Le BO est utilisé pour trouver la combinaison optimale d'hyperparamètres d'un CNN, et le CNN basé sur le BO est utilisé pour corriger le signal de déplacement du pont collecté par le drone. Enfin, la fréquence naturelle du pont est extraite en traitant les signaux de déplacement corrigés à l'aide de l'analyse modale opérationnelle (OMA). De plus, une poutre en acier est utilisée comme modèle expérimental. Le nombre de points de référence et le temps de prise de vue du drone avec l'effet de correction optimal du CNN basé sur le BO sont obtenus par deux groupes d'expériences comparatives, et l'influence de la distance entre la structure et les points de référence sur l'effet de correction du CNN basé sur le BO est déterminée par un autre groupe d'expériences comparatives. La méthode proposée ne nécessite pas de points de référence statiques, ce qui améliore manifestement l'applicabilité des drones ; la conclusion de cet article a une grande importance pour la mesure réelle des vibrations des ponts.



