

Nos recherches
Des modèles multi-échelles aux structures prêtes à voler : Modélisation et Contrôle Haute Fidélité
Nous combinons la capture géométrique assistée par LiDAR, la simulation par éléments finis et l’optimisation pilotée par l’IA pour prédire, concevoir et contrôler activement des structures complexes en génie civil et aérospatial soumises à des charges dynamiques, thermiques et de fatigue.

Thèmes de notre travail
Modélisation par éléments finis multiphysique
Des modèles EF non linéaires et transitoires couplent les phénomènes de vibration, thermo-élasticité et fatigue afin de prévoir le comportement à long terme des ponts et des structures de drones.

Optimisation assistée par IA
Des modèles de substitution (Kriging, RSM) combinés à des algorithmes de recherche par gradient permettent de converger vers des conceptions plus légères, plus rigides et plus tolérantes aux dommages, tout en réduisant considérablement les ressources de calcul nécessaires.

Mise à jour de modèle basée sur les essais non destructifs
Les données de vibration sur le terrain et d’imagerie infrarouge END permettent de boucler le jumeau numérique, réduisant les incertitudes sur les paramètres et rendant possible l’implémentation de lois de commande adaptées à l’état structurel.

Découvrez quelques-uns de nos derniers projets :



Projet en vedette
Intégration d’un nouveau concept de conception pour un drone VTOL avec optimisation multi-niveaux
En tant que combinaison d’un drone à voilure fixe (FW) et d’un drone à décollage et atterrissage vertical (VTOL), le drone hybride suscite un intérêt croissant en raison de sa polyvalence multi-usages.
Avec l’aide de la méthode CFD pour les tests et de la méthodologie des surfaces de réponse (RSM) pour l’optimisation, cet article présente un nouveau concept d’ailes canards intégrées au fuselage du drone. Il combine l’aile delta conventionnelle avec des winglets et la configuration canard. En fonction des exigences et des contraintes de conception, la portance a été optimisée et répartie entre l’aile principale (90–95 %) et l’aile avant (5–10 %). Une approche d’optimisation multi-niveaux a été développée via la RSM. Le premier niveau optimise l’aile delta, et le second évalue la conception finale de l’aile canard. Comparé à la conception initiale, ce concept fournit une portance suffisante avec moins de traînée en mode croisière. De plus, la surface de contrôle avant peut remplacer l’empennage utilisé pour le trim et le contrôle dynamique, transformant le drone en un véhicule sans empennage et réduisant ainsi son poids.
Projet en vedette
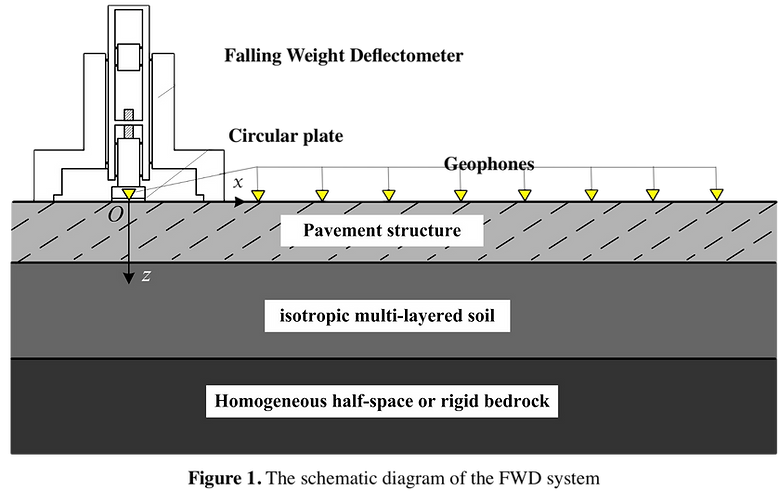
Un algorithme d’inversion du module dynamique des structures en béton routier basé sur un CNN
Basé sur la méthode des éléments spectraux (SEM) et un réseau de neurones convolutifs (CNN), un algorithme d’inversion pour le module dynamique des structures en béton routier est proposé dans cet article.
Afin d’évaluer de manière plus systématique et précise les performances des structures de chaussée à l’aide des techniques d’essai existantes utilisant un déflectomètre à masse tombante (FWD), il est nécessaire d’obtenir des paramètres précis de module dynamique. Dans ce travail, un algorithme d’inversion pour la prédiction du module dynamique est établi à l’aide d’un CNN entraîné sur des échantillons de réponse dynamique de chaussée en béton multicouche obtenus par la méthode des éléments spectraux (SEM). La méthode de descente de gradient est utilisée pour ajuster les poids couche par couche. Par entraînement itératif, la précision du CNN est améliorée. L’algorithme proposé permet d’obtenir des résultats plus précis pour le module dynamique, validés par plusieurs exemples numériques. Il permet également de prédire avec précision le module dynamique et l’épaisseur des différentes couches à partir de la courbe de déplacement issue du FWD. Cette méthode fournit un outil de test fiable pour les structures de chaussée.

Projet en vedette
Identification des paramètres modaux d’un pont à partir de mesures par drone basées sur l’EMD et la transformation de Fourier
Cet article propose deux méthodes, la décomposition empirique en modes (EMD) et la transformation de Fourier (FT), pour corriger les signaux vibratoires mesurés par un drone (UAV), surmontant ainsi les limitations liées au choix des points de référence dans d’autres méthodes telles que la transformation par homographie ou la reconstruction 3D.
Dans la méthode proposée dans cet article, un drone (UAV) est utilisé pour enregistrer une vidéo d’un pont soumis à des vibrations, et le signal de déplacement du pont est extrait de la vidéo à l’aide de la méthode du flux optique de Kanade–Lucas–Tomasi (KLT). Ce signal contient un déplacement erroné dû au mouvement propre du drone pendant la mesure. Ce déplacement erroné peut être efficacement éliminé par la décomposition empirique en modes (EMD) et la transformation de Fourier (FT), permettant ainsi d’obtenir le signal de déplacement réel. Enfin, le signal est traité par la méthode d’analyse modale opérationnelle (OMA) afin d’extraire les paramètres modaux du pont. Les performances de correction des signaux vibratoires et d’extraction des paramètres modaux à partir des signaux, basées sur l’EMD, la FT et le filtrage différentiel (DF), sont comparées en prenant comme référence la mesure par caméra fixe (dont la précision a été vérifiée). Les résultats montrent que l’EMD présente une meilleure fiabilité dans le traitement des signaux mesurés par UAV, principalement en raison de l’absence de facteurs aléatoires et de bruit excessif dans le processus de traitement du signal via EMD.
